所有你需要的是像Microsoft Kinect或华硕Xtion这样的深度传感器。软件的使用界面相当的整洁直观,无需进行多余的操作即可快捷的完成对相关模型的制作设计,只需将传感器移动到物体周围,即可在屏幕上实时和彩色地看到建立的模型,而且还可以对颜色进行设置,对深度等调整,并且也只是对局部进行显示,这样可以对工作的效率进行提高,软件同时使用内置的后期处理功能为3D打印模型做准备,并将模型发布到网络上以向朋友展示。
功能特色
1、实时重建重建物体的实时交互。看到屏幕上的三维模型的建立和调整摄像机的运动得到最好的结果。2、重建的颜色改造后不仅捕捉形状同时对象外观的进行捕捉。如果你的电脑没有一个快速的图形卡,你仍然可以重建对象。简单的记录序列和重建你的CPU离线。3、记录序列后观看和重建的深度和颜色数据记录。这允许您尝试不同的设置在同一序列的重建以获得最好的结果。你也可以记录和再现物体的同时。4、任意体积尺寸重建的体积是不限于立方体。重建的体积可以有任意纵横比。5、网格后处理清理重建的三维模型,使用内置的后处理工具。6、在网格布孔,使其适用于三维打印7、光滑的网格并减少三角形数8、去除小的连接部件或种植网格删除不需要的几何9、将插座重建三维印刷更容易10、指定导出网格尺寸11、制作中空的网状材料使用不当3D印刷
常见问题
1、无法识别传感器/传感器图像抖动要使用传感器,必须安装正确的驱动程序。在安装新驱动程序之前,您需要删除较旧的驱动程序版本(例如SensorKinect,OpenNI 1.x,)。某些传感器在USB3端口上运行时出现问题。因此,我们建议使用USB2端口。2、扫描失败(红色状态指示灯)多种情况可能导致红色状态指示。一种可能性是您的重建帧速率太低。它应该在10-15 fps以上才能使重建工作正常。由于GPU上的处理能力太小,导致重建帧速率低。您应该降低音量分辨率。同时非常缓慢地移动相机也会有所帮助。如果所有这些都没有帮助,您仍然可以尝试记录序列并离线重建它。重建失败的另一种可能性是您扫描的场景主要由平面物体组成(例如桌面,墙壁)。在这种情况下,在场景中放置其他非平面对象可能会有所帮助,以允许重建算法更好地定位场景中的摄像机。您可以稍后在后处理阶段从扫描中删除辅助对象。您还应该始终尝试将相机对准重建体积(深度视图中应该有很多绿色)。当离开重建体积时,重建将失败。
使用说明
1、实时重建:实时交互式重建对象。 了解3D模型如何在您的屏幕上构建并调整相机移动以获得最佳效果。2、颜色重建:重建捕捉形式和颜色。3、CPU重建:即使您的PC没有快速图形卡,也可以创建3D模型。 只需拾取一个对象序列并在处理器上离线重建它。4、记录序列:记录摄像机的深度和视频数据,以便以后回放和重建。 这允许您在同一序列上尝试不同的重建设置,以获得最佳结果。 您还可以同时记录和重建。5、任何卷大小:重建体积不限于立方体。 您可以设置任何宽高比。6、出口:将3D模型导出为标准格式PLY,OBJ和STL,或将其上传到在线打印服务Sketchfab。7、多才多艺:打印功能来自专业打印提供商的彩色打印件或带桌面3D打印机的单色打印机,如Leapfrog Creatr,Ultimaker 2或UP!

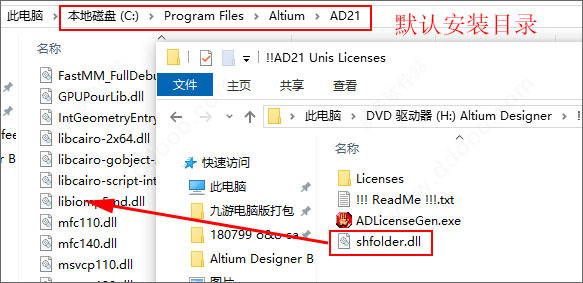
安装破解教程
1、下载压缩包解压之后双击软件开始安装2、接受安装协议3、选择安装位置4、创建桌面快捷方式5、等待安装完成6、安装完成先不要打开软件7、复制破解补丁里的文件到软件安装目录8、选择复制和替换,完成之后9、打开软件之后已经是破解成功的了